Business

Business
The goal is to help maintain a high level of safety, reliability, and integrity in the United States natural gas transmission and distribution system through the development and design of a new robotic platform and sensor module capable of navigating through all known physical obstacles found in un-piggable transmission and distribution gas pipelines, while performing a reliable inspection of the pipe wall at a level of inspection equivalent to that currently achieved by commercially available smart pigs.

Northeast Gas Association – project management
Foster-Miller, Inc. – research and development program
GE Power Systems – sensor development
Location:
New York, New York 10036-5701
The development of tools to inspect un-piggable transmission and/or distribution pipelines presents a formidable technical challenge as well as a significant financial incentive to the gas industry. The adaptation of current pigging technology may not be viable given the geometric challenges of existing interstate and utility-owned pipelines. External direct assessment techniques have not been shown to be universally adequate, accurate, or cost-effective. An innovative robotic approach is the method of choice for these applications.
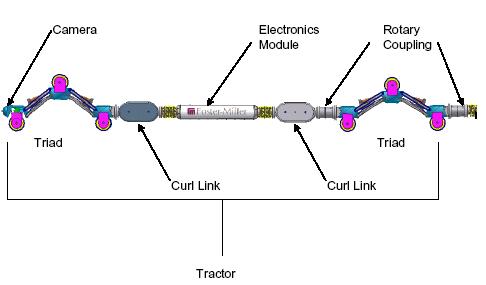
The inspection of un-piggable gas transmission and distribution pipelines requires the marriage of a highly adaptable/agile robotic platform with advanced sensor technologies operating as an autonomous or semi-autonomous inspection system. The Pipe Mouse has been built to a strict set of performance criteria appropriate for low-pressure gas distribution networks. The Mouse, designed to be highly mobile and agile, has the ability to: 1) travel long distances from the entry point and steer down a branch line of pipe tees, 2) negotiate mitered (zero degree) elbows, 3) navigate in both the horizontal and vertical planes, 4) pass through partial section valves, and 5) adapt (by a factor of two) to changes in pipe diameter. These are precisely the type of obstacles that create problems for inspecting un-piggable transmission mains.
For this program, sensor development is considerably more challenging than for conventional pigging due to the greater variance in pipe diameter and the more difficult obstacles encountered in un-piggable pipelines. The ability to actively expand and retract the onboard sensor is needed, not just for obstacle avoidance, but also to allow upstream (reverse direction) travel.
It is clear that the ability to inspect non-piggable transmission pipelines presents a significant need and challenge to the gas industry. The adaptation of current pigging technology may not be viable given the geometric challenges and flow restrictions of the utility owned transmission line population. The external direct assessment technique has not been shown to be sufficiently reliable/accurate or cost-effective under all field conditions. The application of an innovative robotic approach to the inspection may be the most viable approach. The anticipated benefits from the use of this platform include: the ability to inspect inaccessible pipelines, cost savings from not having to remove obstacles for conventional pigs, reduced inspection cost ($/mile) compared to direct assessment or hydro testing and a more versatile platform capable of a variety of inspection services. These capabilities serve to impact the public through enhanced safety, integrity and reliability of delivery of natural gas through the nation's pipeline network by reducing the likelihood of pipeline failure through undetected damage.
All work under the project has been completed. Work included primarily the development of designs and specifications for all aspects of the robotic inspection platform and deployable MFL sensor for use in currently un-piggable transmission pipelines. Design specifications were completed for the primary key components and systems of the robot and sensor (sizing, kinematics, communications, electrical and controls and sensor mechanics) to the point that detailed engineering design of the components could be performed in follow-on work.
Work under this project has been completed. A follow-on project was initiated in October 2004 with work to include the actual engineering design and building of a prototype robotic pipeline inspection system capable of maneuvering through the majority of obstacles which render transmission lines un-piggable. The platform to be developed and built will be required to include a design which allows the integration of different novel advance inspection sensor technologies for use in pipeline Nondestructive Evaluation (NDE) with an integrated platform/sensor live gas pipeline is anticipated within three years. The results of work completed under this current project is to be included in the project final report to be posted by early Spring 2005.
$572,525
$200,000
NETL – Richard Baker (richard.baker@netl.doe.gov or 304-285-4714)
Northeast Gas Association – Daphne Dzurko (ddzurko@nygas.org or 212-354-4790)
Final Report [PDF-2400KB] - March 2004